Progetto RTS-AGW
Sviluppo e sperimentazione
Ogni filone di ricerca punta a migliorare l’efficienza di invio/consegna dei singoli carri, accrescere la velocità di trasporto e ridurre i costi di gestione.
Al momento Co.El.Da Software, grazie alle proprie capacità di prototipazione, ha già progettato e realizzato il software di controllo e gestione dei sistemi di motorizzazione, alimentazione, frenatura, sensoristica e composizione/scomposizione automatica del “Carro intelligente” e del “Carrello automatico”, ed il “sistema di stazione” per predisporre le movimentazioni dei carri da movimentare, per determinare i percorsi ottimali da compiere, con individuazione delle singole tratte di percorrenza per le manovre necessarie allo spostamento, per gestire, interfacciandosi con il gestore della rete ferroviaria che è l’unico soggetto abilitato a concedere le autorizzazioni alla percorrenza di singole tratte in sicurezza, la movimentazione automatica dei carri.
Quest’ultimo sistema è in grado di interfacciarsi, con una propria componente elettronica progettata ad hoc, alle apparecchiature di segnalamento (segnali bassi) attualmente in uso nelle stazioni, rilevando lo stato di commutazione degli scambi.
Inoltre non presuppone alcuna esigenza di modifica alle regole vigenti sia per le manovre sottoposte a vincoli di percorrenza, sia per le manovre “a vista”.
Architettura di sistema
L’architettura di sistema è rappresentata in figura, essa comprende quattro sistemi:
Nella fase di composizione/scomposizione del convoglio in corrispondenza della stazione i quattro sistemi interagiscono tra loro e con il sistema di stazione locale FS in un continuo scambio reciproco di informazioni, garantendo che le operazioni di formazione in itinere del convoglio (in ogni stazione possono essere agganciati o sganciati carri ferroviari) avvengano in modo automatico senza l’intervento dell’uomo e in condizioni di sicurezza.
Nello specifico il sistema centrale è costituito da “server” che ospitano i programmi di gestione delle informazioni. Esso è preposto all’acquisizione delle esigenze di trasporto dell’utenza, al controllo ed alla gestione dei servizi di trasporto. Il sistema centrale interagisce in modo diretto con il sistema periferico di stazione (COELDA) nel quale vengono convogliate e raccolte tutte le informazioni provenienti dagli altri sistemi periferici e dal sistema di stazione locale FS.
Il sistema periferico di stazione si trova a terra e si interfaccia interagendo con:
Il sistema periferico mobile di gestione del carro (CPU – vagone intelligente) si trova a bordo dello stesso carro. Esso provvede alla movimentazione del carro, seguendo le indicazioni provenienti dal sistema periferico di stazione e da quello a bordo del locomotore. In dettaglio, la CPU del vagone intelligente, una volta ricevute le informazioni dal sistema stazione e dal sistema a bordo locomotore, grazie alle indicazioni fornite da un sistema GPS circa la posizione, è in grado di attivare il movimento del carro attraverso un continuo scambio di informazioni con i diversi apparati funzionali di bordo. Tra gli altri, con l’inverter che governa il motore elettrico e fornisce informazioni sullo stato dello stesso motore (accelerazione, velocità, temperatura, ecc.), con il sistema frenante ricevendo informazioni in merito alla frenatura e quindi ai valori di pressione dell’impianto; con il gancio automatico che fornisce dati in merito alle distanze reciproche attraverso sensori di prossimità e telecamere; con il sistema di controllo del movimento, formato da un insieme di sensori laser, sensori termici, sensori lidar, accelerometri e telecamere, deputato a garantire la sicurezza nel corso della movimentazione, evitando possibili collisioni tra carri e/o tra carri e oggetti esterni presenti sui binari. Acquisite le informazioni, la CPU del carro le elabora e le processa e scambia i risultati ottenuti con gli altri sistemi periferici e con le componenti sensoristiche del carro per attivarne il movimento automatico.
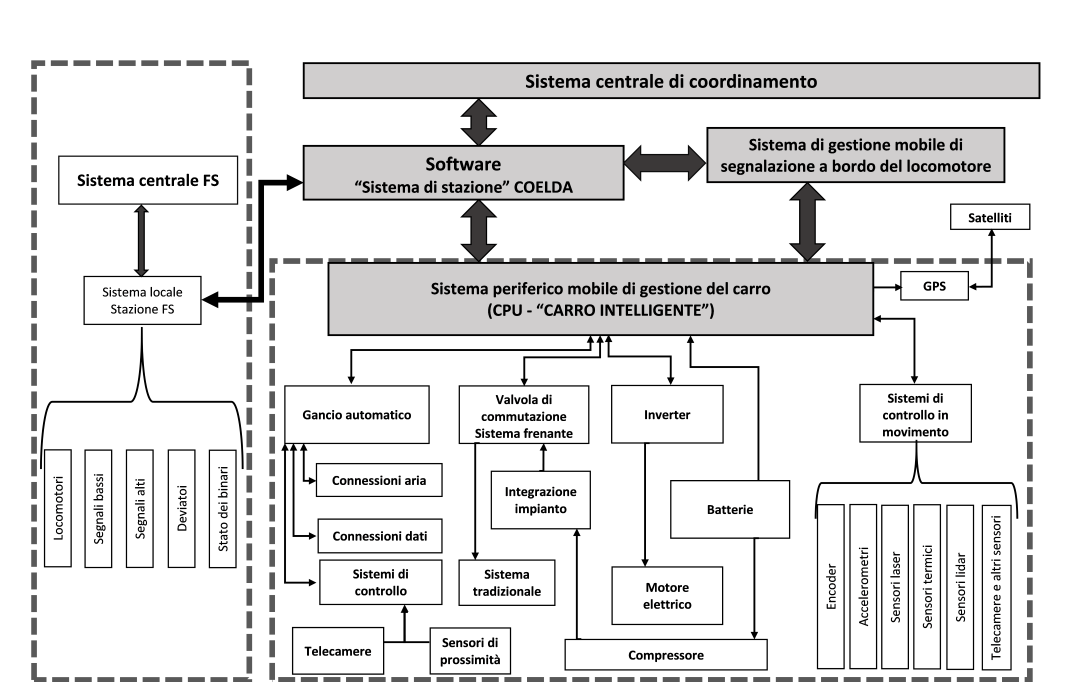
ARCHITETTURA logica del sistema stazione COELDA integrato alla struttura FS
Sistema di stazione
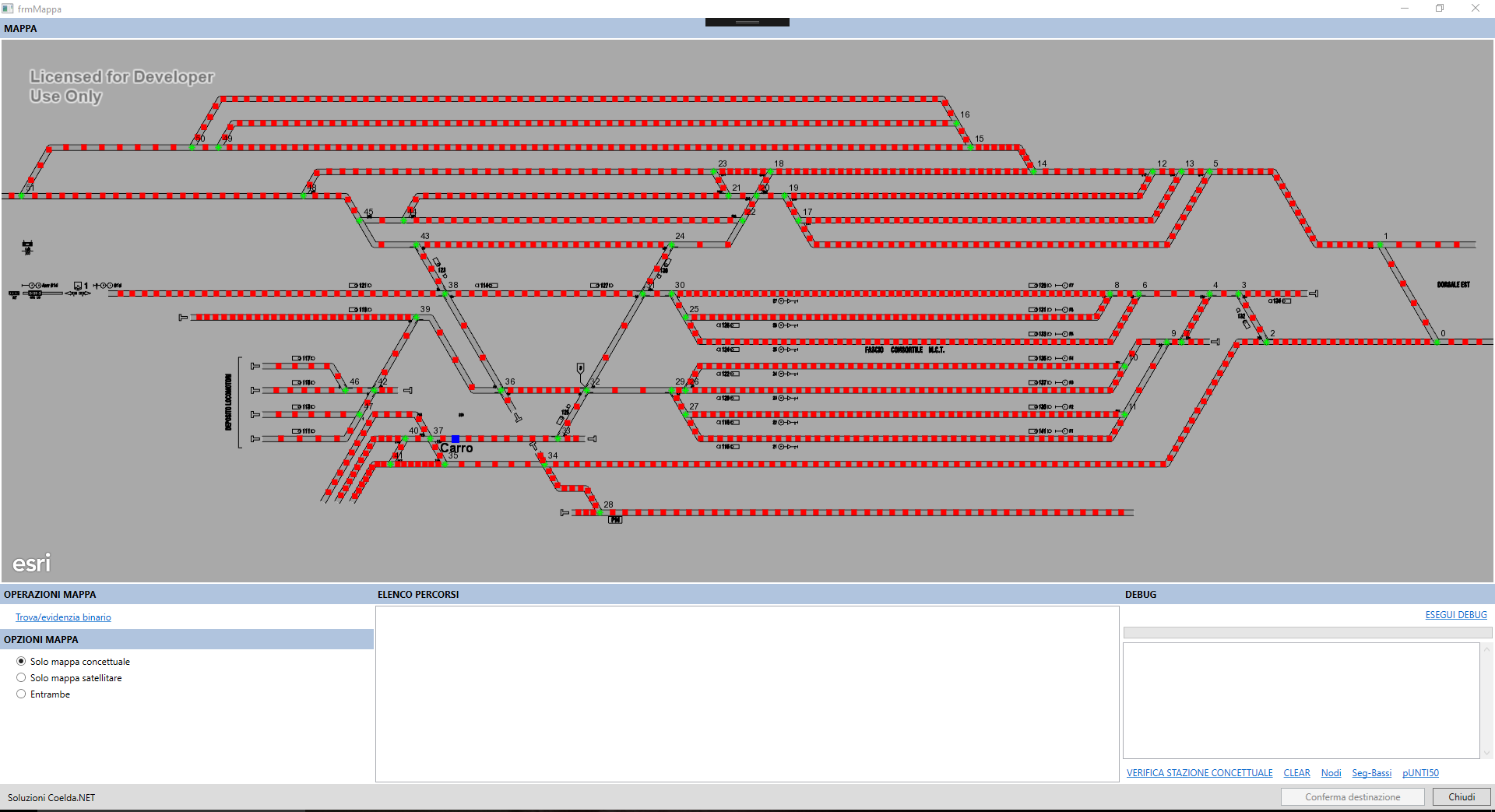
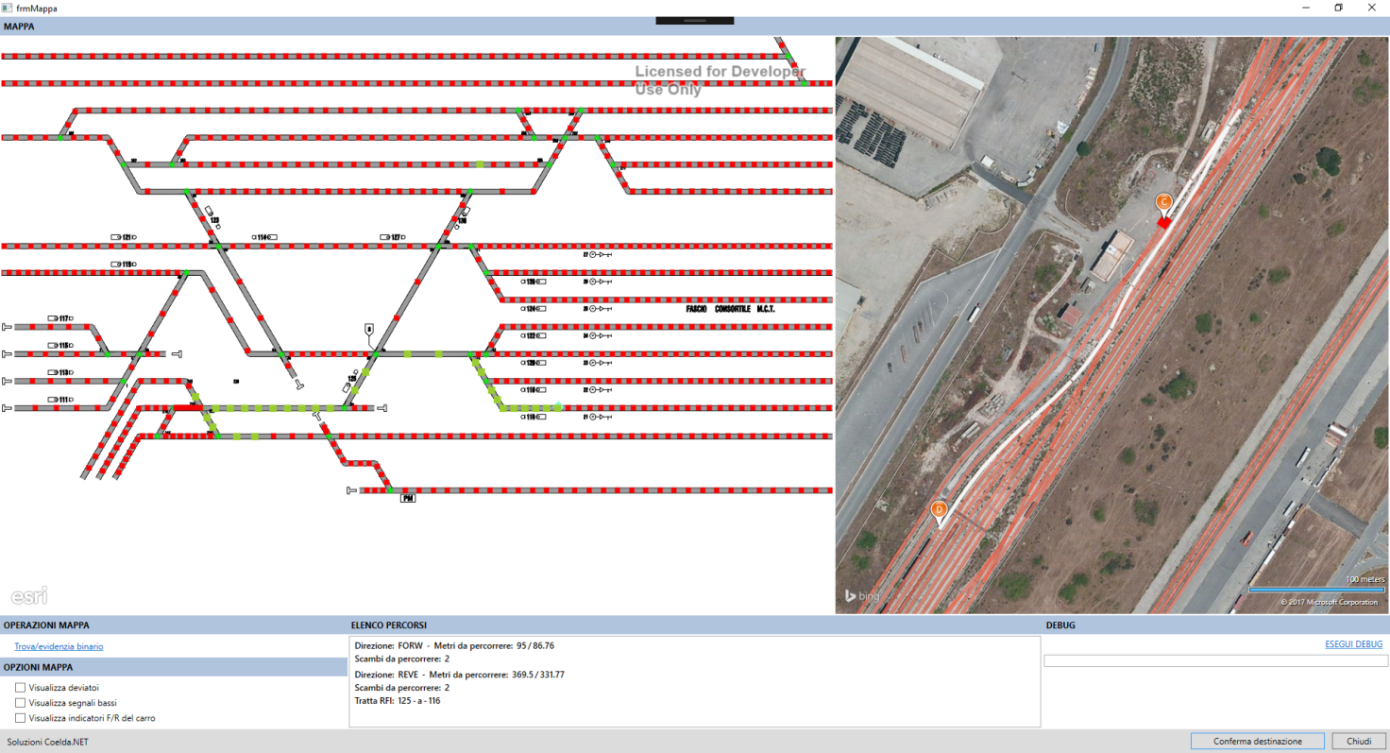
Ai fini della movimentazione intelligente del carro all’interno di una stazione, è stato elaborato un software innovativo, capace di interfacciarsi con i più moderni sistemi di localizzazione GPS e di tradurre la disposizione dei binari e le funzionalità operative in mappe concettuali tipiche delle stazioni ordinarie. Una prima applicazione è stata operata sull’ambito della stazione di S. Ferdinando, al servizio del porto di Gioia Tauro. Il software permette di determinare i percorsi, instradare i carri da una determinata posizione ad un’altra e tenere sotto controllo i sistemi di segnalamento; ottimizzando lo spostamento in rapporto ai vincoli regolamentari.
Operativamente, dopo aver posizionato sulla mappa satellitare (mappa Bing) o sulla corrispondente mappa concettuale i carri presenti nello scalo, in base alle coordinate GPS dei ricevitori presenti su di essi, è possibile individuare da schermo il carro da movimentare e la posizione finale.
Il software determina il percorso sulla rete, ne calcola la lunghezza, e attiva lo spostamento. Il percorso viene riprodotto su entrambe le mappe, ed è possibile seguire lo spostamento del carro in tempo reale.
COSTRUZIONE DELLE MAPPE
In particolare, grazie alla documentazione fornita da RFI (mappatura tecnica dello scalo) e con l’ausilio di rilievi sul campo, abbiamo rilevato una serie di punti discreti (con coordinate GPS ogni 50 cm di binario) l’intera rete presente a S. Ferdinando (oltre 60.000 punti), e realizzato una base dati contenente tutte le tratte, i deviatoi e i segnali bassi presenti nell’area.
Allo stesso tempo sono stati inseriti tutti gli instradamenti possibili secondo la regolamentazione di RFI e i percorsi possibili con manovre “a vista”, ossia non soggette a regole particolari di instradamento. Da ciò si è potuto generare un reticolo di binari che è stato sovrapposto alle mappe satellitari geo-referenziate.
La figura seguente ottenuta con la sovrapposizione del reticolo realizzato a partire dalla mappatura dei binari con le immagini satellitari, permettere di verificarne l’immediata congruenza con un’immediata verifica visiva di eventuali errori di mappatura.

Quadro sinottico di stazione con mappa di Bing
Per permettere l’utilizzo del software da parte degli operatori ferroviari secondo le modalità usuali operative, le mappe cartografiche sono state associate a mappe concettuali, sovrapponendo le coordinate GPS delle mappe reali con i corrispondenti punti sulle mappe concettuali che non hanno rapporti dimensionali coerenti con le mappe reali, suddividendo le diverse tratte in settori di lunghezza fissa.
Quadro sinottico di stazione con mappa concettuale
Successivamente abbiamo quindi sviluppato il software che permette di determinare i percorsi per spostare un carro da una posizione in un binario ad un’altra su binario diverso, ottimizzando lo spostamento in base alle necessità di inversione di marcia e con i vincoli presenti.
Operativamente, il software visualizzerà sul monitor tutti i carri automatici presenti e le tratte disponibili nello scalo in base alle coordinate GPS forniti da essi, e una volta scelto quello da movimentare sarà possibile con un click selezionare il carro da movimentare e la sua destinazione. Il software determinerà automaticamente il percorso da compiere, ed impartirà al carro gli ordini per muoversi in una ben determinata direzione per una certa distanza.
La selezione del carro e del punto di destinazione sono identicamente possibili anche operando tramite la mappa concettuale (lo spostamento avviene nel settore specificato).
I percorsi determinati sono riprodotti su entrambe le mappe dove è anche possibile seguire passo-passo lo spostamento dei carri in tempo reale.
Quadro sinottico generale
Poiché i sistemi automatici di RFI non accettano richieste esterne di commutazione di deviatoi in modalità elettronica, è prevista la comunicazione al capostazione della manovra necessaria, con contestuale specifica delle informazioni secondo gli standard usuali di RFI. L’autorizzazione alla manovra, una volta predisposti i deviatori, viene rilevata automaticamente da RFI, essendo il sistema in grado di ricevere i segnali provenienti dagli stessi deviatoi.
Nella impostazione data, il controllo di binari e deviatoi rimane sempre ed esclusivamente sotto il controllo del Gestore di rete (in quanto potrebbero richiedere di effettuare manovre contemporanee carri di diverse Aziende di trasporto operanti nello scalo).
Su scali interamente riservati alla movimentazione automatica per spostamenti di carri e/o composizione convogli ed i cui binari non interferiscono con la rete RFI, è possibile gestire in modo completamente automatico la commutazione dei deviatoi ed ottimizzare le sequenze di movimentazione dei carri.
Questi scali sono rappresentati da Porti (che potranno adoperare il sistema anche per la movimentazione dei container dalle banchine alle aree di stoccaggio), Aree logistiche, Aree industriali infrastrutturate con binari, singole grosse Aziende che potranno adoperare i binari anche per la semplice movimentazione interna dei materiali.
Automazione dei mezzi
Il “carro intelligente” differisce dal carro tradizionale perché è equipaggiato con una struttura hardware completa di microprocessore che ne costituisce il “cervello”. Essa controlla la movimentazione del veicolo, interagendo con la piattaforma telematica, ricevendo segnali dai dispositivi di controllo della posizione e del movimento, rilevando ostacoli con telecamere e Radar a lungo e corto raggio, e la presenza di persone in situazione di pericolo con sensori perimetrali termici. Il colloquio tra il carro e la piattaforma telematica è assicurato da collegamento “Wireless” su rete privata presente nelle stazioni o da collegamenti “diretti” sul convoglio. Si prevede lo sviluppo e l’installazione di un pannello integrativo esterno di comandi manuali di marcia e di aggancio/sgancio, adoperabili in situazioni di avaria del sistema di controllo automatico. Il carro è provvisto inoltre di tag utili a rilevarne la posizione attraverso GPS; è in avanzata fase di sperimentazione inoltre un insieme di sensori (Encoder, Accelerometri, Sensori laser, Sensori termici, Sensori lidar, Telecamere, ecc.) in grado di rilevare la presenza di ostacoli circostanti ai fini della sicurezza di marcia.
CARRELLO DI MANOVRA
Il carrello di manovra, alla stregua del carro intelligente, è da considerarsi a tutti gli effetti un mezzo completamente autonomo ed è realizzato partendo da un comune carrello portante a due assi al quale sono state apportate modifiche per garantire la movimentazione autonoma.
Nello specifico la movimentazione avviene attraverso l’integrazione di tecnologie diverse; in particolare sono previste le seguenti funzionalità:
Una volta assemblato il carrello di manovra sarà in grado di effettuare le seguenti operazioni di scomposizione, composizione e posizionamento:
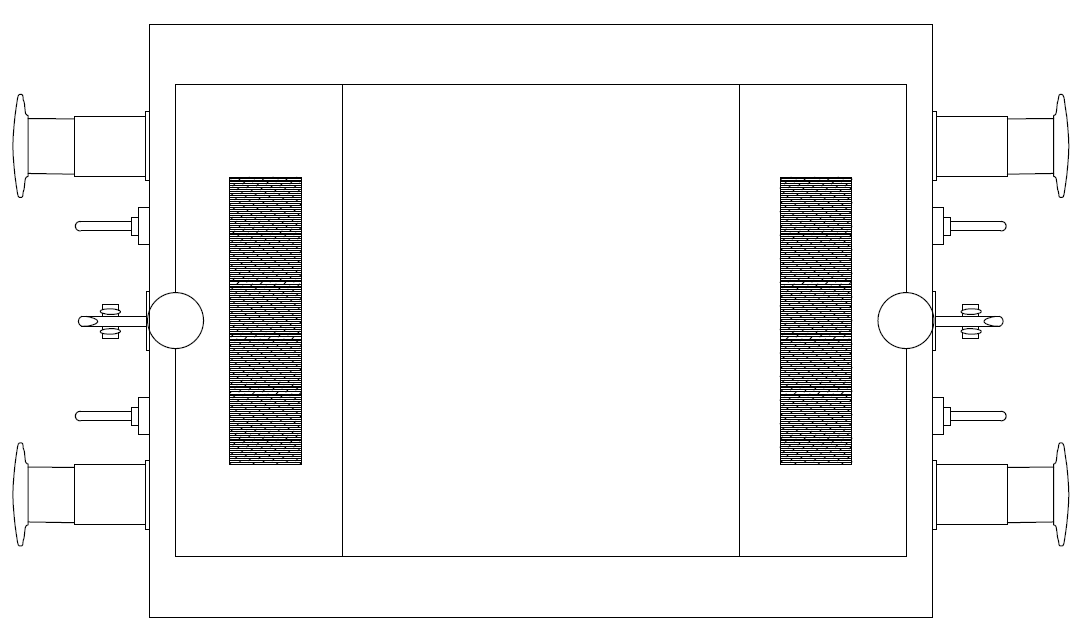
Vista in pianta e prospetto del carrello di manovra
Sperimentazione
Per effettuare la sperimentazione abbiamo equipaggiato un carro merci con un motore elettrico, sistema di alimentazione a batterie, compressore d’aria, sensori di distanza laser, sensori di rilevazione posizionamento GPS, sistema informatico di gestione e controllo a distanza.
La sperimentazione è in corso nell’area della stazione di S. Ferdinando (all’interno dell’area doganale del Porto di Gioia Tauro).
Di seguito sono illustrate alcune delle componenti implementate su un carro fornitoci da Trenitalia (K12), per mettere a punto il software di gestione del carro.
Il carro è stato attrezzato ed è funzionale per poter effettuare autonomamente tutti gli spostamenti comandati da remoto tramite un sistema computerizzato.
La sperimentazione che abbiamo effettuato ci ha fornito tutti gli elementi utili a far sì che si riesca a fare l’upgrade dei carri attuali senza incidere in alcun modo sulla modalità operativa attuale di gestione degli stessi carri nel momento in cui avviene la commutazione da carro isolato (gestito dal nostro sistema) a carro agganciato, nel quale tutti i sistemi da noi implementati sono completamente disattivati.
I risultati fin qui ottenuti con la sperimentazione ci hanno fornito importanti indicazioni su come procedere nella messa a punto, avendo come primo obiettivo quello di far sì che si possano effettuare automaticamente le manovre per la composizione dei convogli facendo un upgrade poco costoso dei carri.
In particolare abbiamo prestato molta attenzione ai limiti posti dal sistema frenante (westinghouse) della maggior parte degli attuali carri, che ha tempi di reazione lunghi e non precisamente determinati, sia nella fase di frenatura che di rilascio dei freni, per far sì che le manovre di composizione dei convogli possano avvenire in assoluta sicurezza. Abbiamo dovuto sensorizzare il fine corsa dello stantuffo del freno ed adattato il software privilegiando in primis le manovre sicure, più che la velocità e l’ottimizzazione dei tempi di manovra. Stiamo testando diversi sensori per l’avvicinamento e verificando quelli che meglio si adattano alle condizioni operative in ambiente aperto e ricco di interferenze (comprese ad es. la presenza di grossi insetti che rende inutilizzabili i sonar quando si posano sopra).
Gli interventi di aggiornamento effettuati sul carro riguardano il sistema pneumatico di controllo della pressione della condotta principale, il sistema di trazione alimentato a batterie, il sistema di sensori per il posizionamento sulla linea e l’avvicinamento ad altro carro, il sistema di allerta acustico e visivo per segnalare l’avvio della movimentazione ed il sistema di sicurezza per la rilevazione di ostacoli, tutti coordinati e gestiti da un computer a bordo a cui sono collegati tramite PLC di gestione e controllo.
Tranne il sistema di sicurezza per la rilevazione di ostacoli (la cui tecnologia è oggi ampiamente disponibile essendo stata sviluppata per altri sistemi), il resto è già realizzato nelle componenti fisiche e software.
Tutto quello che stiamo implementando sul carro è operativo solo durante la fase di carro “isolato”, mentre in un carro agganciato ad un convoglio, tutte le implementazioni possono essere considerate solo un carico.
Proseguendo nella sperimentazione, abbiamo sviluppato la parte software relativa al “sistema di stazione” per poter gestire gli ordini di movimentazione che saranno eseguiti dal carro.
Questa sperimentazione ha necessitato l’effettuazione della mappatura (anche con coordinate relative per le mappe tematiche) per punti discreti dei binari e degli scambi presenti a S. Ferdinando (almeno di quelli dotati di scambi automatici su sui fare sperimentazione) ed abbiamo definito le modalità di interfaccia tra il nostro sistema ed il gestore della rete (RFI).
Abbiamo cioè realizzato i moduli necessari per poter interfacciare l’operatore che gestisce gli scambi nell’area di stazione, per richiedere la disponibilità di un determinato percorso di manovra (articolato per singole tratte o completo) e potersi coordinare per richiedere la commutazione degli scambi e riceverne la conferma di avvenuta operazione insieme con l’autorizzazione alla percorrenza sia con modalità automatica (tramite il collegamento di una nostra apparecchiatura elettronica collegata al sistema di segnalamento della stazione), sia con modalità manuale.
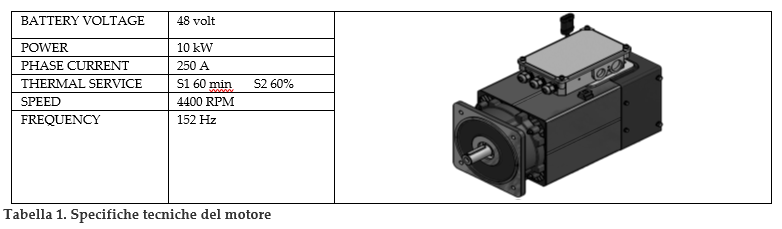
Al momento il sistema di trazione prototipale, montato sul carro, è costituito da un motore elettrico proporzionato sulla necessità di movimentare il carro ferroviario a vuoto (tara 13 ton), alla velocità massima, per manovra o per breve trasferimento, di 15 km/h.
Il sistema frenante riproduce, in forma semplificata, il sistema di alimentazione e comando normalmente disposto sulla motrice di un treno. Sono state mantenute inalterate le componenti presenti, inserendo quanto necessario alla produzione dell’aria compressa (p=5,5 bar) ed al comando delle manovre di frenatura (frenatura/neutro/sfrenatura) secondo lo schema seguente.
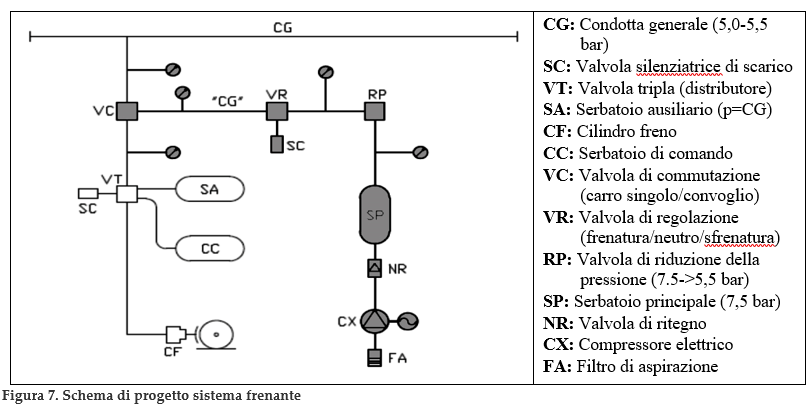
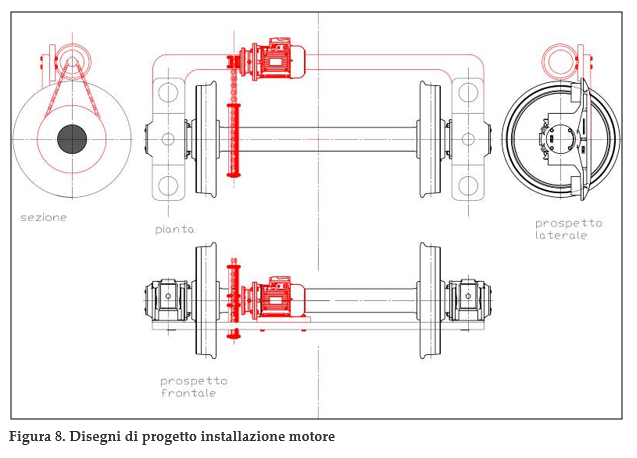
Per la movimentazione del carro assumono ruolo primario i seguenti componenti:
Di seguito si riporta una possibile soluzione per il montaggio del motore e della trasmissione sulla sala del carrello. Sono in progettazione altre soluzioni anche con sistemi di trasferimento del moto diversi.